









Controlador de motor serial duplo Pololu Qik 2s12v10
Descrição Esquerda Anexos
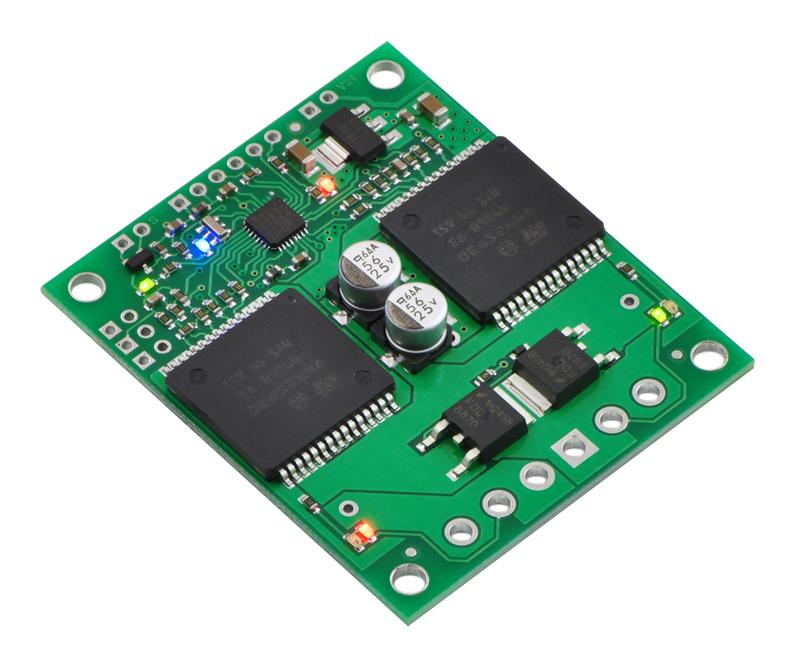
Este poderoso controlador de motor permite o controle variável de velocidade e direção de dois grandes motores CC com escovas usando uma interface serial simples e fornece vários recursos avançados, como controle de aceleração do motor e limitação de corrente configurável. A detecção automática de transmissão de até 115,2 kbps e as entradas para serial RS-232 e TTL facilitam a adição de motores ao seu microcontrolador ou projeto baseado em computador. A faixa de tensão operacional é de 6 a 16 V; a corrente contínua por canal é de até 13 A (pico de 30 A).
O qik 2s12v10 adiciona uma opção de alta potência abrangente, mas fácil de usar, à linha de controladores de motor da Pololu. A placa compacta - é quase do mesmo tamanho que a placa transportadora dupla VNH2SP30 sozinha - permite que qualquer microcontrolador ou computador com uma porta serial acione dois motores CC com escovas com direção total e controle de velocidade, fornecendo até 13 A (contínuo) por motor canal sem dissipador de calor e tolerando picos de até 30 A.
As melhorias em relação aos produtos concorrentes incluem:
Para uma versão de menor potência deste controlador, considere o qik 2s9v1. Para dispositivos semelhantes que suportam recursos adicionais e interfaces de controle, considere os controladores de motor simples de alta potência, controlador de motor TReX e controlador de motor jrk 12v12 com feedback.
Principais características do Qik 2s12v10
Especificações
Hardware incluído
O qik é fornecido com uma faixa de cabeçalho macho reta de 0,100" 12 × 1, uma faixa de cabeçalho macho reta de 0,100" 3 × 2, três blocos de terminais de 2 pinos e três blocos de curto-circuito vermelhos.
Para a instalação mais compacta, você pode soldar fios diretamente nos próprios pinos qik e pular usando o hardware incluído. Para instalações de alta corrente, evite usar os blocos terminais fornecidos, que são classificados para até 15 A e, em vez disso, solde diretamente os fios do motor e da fonte de alimentação aos blocos.
O hardware incluído permite que você faça conexões menos permanentes. Você pode quebrar a tira de cabeçalho 12 × 1 em uma peça 6 × 1 e duas peças 2 × 1 e soldar essas tiras nos pinos lógicos do qik onde planeja fazer conexões ou pode usar um alicate para retirar os dois pinos de cabeçalho na tira 12 × 1 original para a qual o qik não tem furos e solde toda a tira aos pinos lógicos do qik. Você pode ver esta última abordagem na imagem acima. Você pode fazer seus próprios cabos com conectores fêmeas e conectá-los aos conectores machos do seu qik, ou pode soldar os pinos no outro lado da placa e simplesmente conectar seu qik a uma placa de ensaio. Você também pode considerar o uso de uma faixa de cabeçalho macho de ângulo reto de 0,100" (não incluída) para um perfil mais baixo.
A tira de cabeçalho 3 × 2 pode ser soldada aos pinos do jumper, conforme mostrado acima, o que permite que você use os blocos de curto-circuito incluídos, e os blocos de terminais incluídos travam juntos para formar uma única tira de 6 pinos que você pode soldar ao lado de alimentação da placa.
Código de amostra
Escrevemos uma biblioteca básica do Arduino para os controladores de motor serial duplo qik que simplifica a interface desses controladores com um Arduino. A biblioteca lida com os detalhes da comunicação serial com o qik, permitindo que dois motores CC com escovas sejam controlados facilmente.
O qik 2s12v10 adiciona uma opção de alta potência abrangente, mas fácil de usar, à linha de controladores de motor da Pololu. A placa compacta - é quase do mesmo tamanho que a placa transportadora dupla VNH2SP30 sozinha - permite que qualquer microcontrolador ou computador com uma porta serial acione dois motores CC com escovas com direção total e controle de velocidade, fornecendo até 13 A (contínuo) por motor canal sem dissipador de calor e tolerando picos de até 30 A.
As melhorias em relação aos produtos concorrentes incluem:
- PWM de alta frequência para eliminar o zumbido ou ruído do eixo do motor induzido por comutação
- um protocolo de comunicação robusto e de alta velocidade com resposta de condição de erro configurável pelo usuário
- LEDs visíveis e um modo de demonstração para ajudar a solucionar problemas de instalações
- proteção de energia reversa
Para uma versão de menor potência deste controlador, considere o qik 2s9v1. Para dispositivos semelhantes que suportam recursos adicionais e interfaces de controle, considere os controladores de motor simples de alta potência, controlador de motor TReX e controlador de motor jrk 12v12 com feedback.
Principais características do Qik 2s12v10
- Controle bidirecional simples de dois motores de escova CC.
- Faixa de alimentação operacional de 6 V a 16 V.
- 13 A corrente contínua máxima por motor (pico de 30 A).
- Controle serial bidirecional não invertido de nível lógico para fácil conexão a microcontroladores ou controladores de robôs.
- Controle serial unidirecional de nível RS-232 para fácil conexão a uma porta serial de PC.
- Detecção automática opcional de taxa de transmissão de 1200 bps a 115,2 kbps.
- Sete LEDs indicadores integrados (energia, status/pulsação, indicador de erro e indicadores do motor) para depuração e feedback.
- Recursos avançados incluem aceleração configurável, feedback de corrente do motor e limitação de corrente.
- Saída de erro para facilitar a recuperação do controlador principal de uma condição de erro.
- Desligamento opcional do motor em caso de erro ou timeout serial para segurança adicional.
- O modo de demonstração habilitado para jumper permite o teste inicial sem qualquer programação.
- A detecção de erro CRC opcional elimina erros seriais causados por ruído ou falhas de software.
- Compreensivo Guia do usuário.
Especificações
| Canais motores: | 2 |
|---|---|
| Tensão operacional: | 6 – 16 V |
| Corrente de saída contínua por canal: | 13A |
| Corrente de saída de pico por canal: | 30A |
| Faixa de taxa de transmissão de detecção automática: | 1200 – 115.200 bps |
| Taxas de transmissão fixas disponíveis: | 115.200 bps, 38.400 bps, 9600 bps |
| Frequências PWM disponíveis: | 19,7 kHz, 9,8 kHz, 2,5 kHz, 1,2 kHz, 310 Hz, 150 Hz |
| Proteção contra tensão reversa?: | Y |
| Motorista: | VNH2SP30 x2 |
Hardware incluído
O qik é fornecido com uma faixa de cabeçalho macho reta de 0,100" 12 × 1, uma faixa de cabeçalho macho reta de 0,100" 3 × 2, três blocos de terminais de 2 pinos e três blocos de curto-circuito vermelhos.
Para a instalação mais compacta, você pode soldar fios diretamente nos próprios pinos qik e pular usando o hardware incluído. Para instalações de alta corrente, evite usar os blocos terminais fornecidos, que são classificados para até 15 A e, em vez disso, solde diretamente os fios do motor e da fonte de alimentação aos blocos.
O hardware incluído permite que você faça conexões menos permanentes. Você pode quebrar a tira de cabeçalho 12 × 1 em uma peça 6 × 1 e duas peças 2 × 1 e soldar essas tiras nos pinos lógicos do qik onde planeja fazer conexões ou pode usar um alicate para retirar os dois pinos de cabeçalho na tira 12 × 1 original para a qual o qik não tem furos e solde toda a tira aos pinos lógicos do qik. Você pode ver esta última abordagem na imagem acima. Você pode fazer seus próprios cabos com conectores fêmeas e conectá-los aos conectores machos do seu qik, ou pode soldar os pinos no outro lado da placa e simplesmente conectar seu qik a uma placa de ensaio. Você também pode considerar o uso de uma faixa de cabeçalho macho de ângulo reto de 0,100" (não incluída) para um perfil mais baixo.
A tira de cabeçalho 3 × 2 pode ser soldada aos pinos do jumper, conforme mostrado acima, o que permite que você use os blocos de curto-circuito incluídos, e os blocos de terminais incluídos travam juntos para formar uma única tira de 6 pinos que você pode soldar ao lado de alimentação da placa.
Código de amostra
Escrevemos uma biblioteca básica do Arduino para os controladores de motor serial duplo qik que simplifica a interface desses controladores com um Arduino. A biblioteca lida com os detalhes da comunicação serial com o qik, permitindo que dois motores CC com escovas sejam controlados facilmente.
Propriedades
Informações da marca
| Marca | Pololu |
| Modelo | 1112 |
€ 76,20€ 61,95 Excl. CUBA (PT)
Produtos relacionados
Perguntas do cliente
Q
Avaliações de Clientes
Controlador de motor serial duplo Pololu Qik 2s12v10 ★★★★★Clique em uma estrela para deixar sua avaliação
- Em estoque Pololu 3.3V regulador de tensão elevador U1V10F3 € 6,10 Ver produto
- Em estoque Pololu 5V, 500mA Regulador de tensão abaixador D24V5F5 € 7,75 Ver produto
- Em estoque Pololu Chave deslizante Mini MOSFET com proteção contra tensão reversa, LV € 4,20 Ver produto
- Em estoque Pololu Regulador de tensão elevador/redutor S7V7F5 € 7,35 Ver produto
- Em estoque Pololu Matriz de sensores de refletância QTR-8A € 11,20 Ver produto
- Em estoque Pololu 5V regulador de tensão elevador U1V10F5 € 6,- Ver produto
- Em estoque Par de suporte de motoredutor de metal Pololu 20D mm € 8,65 Ver produto
- Em estoque Pololu Cabo de Extensão Servo 12" Macho - Fêmea € 4,30 Ver produto
- Em estoque Pololu Mini interruptor de alimentação com proteção contra tensão reversa, LV € 4,60 Ver produto
- Em estoque Pololu Cabo plano com terminais pré-crimpados 10 cores FF 12" (30 cm) € 3,80 Ver produto
- Em estoque Pololu Regulador de tensão redutor de 3,3 V, 3,7 A D30V30F3 € 17,30 Ver produto
- Em estoque Pololu Botão liga/desliga grande com proteção contra tensão reversa, HP € 6,35 Ver produto
- Em estoque Pololu Fio de cobre flexível em carretel - vermelho - 20 AWG / 0,52 mm² - 12 metros € 11,30 Ver produto
- Em estoque Pololu Motor DC escovado: tamanho 130, 6V, 11,5kRPM, parada de 800mA € 2,95 Ver produto
- Em estoque Pololu Fio trançado: preto, 22 AWG, 50 pés € 10,45 Ver produto