









Sensor Sparkfun RedBot - Amortecedor Mecânico
Descrição Anexos
O sensor mecânico do pára-choque está equipado com um conector de três pinos. Isso permite uma conexão direta à placa-mãe RedBot usando fios jumper fêmea para fêmea. Com a biblioteca RedBot, é fácil programar seu robô para navegar em torno de obstáculos com eficiência.
É importante observar que a maioria dos tutoriais do RedBot recomenda o uso de dois sensores mecânicos de pára-choque. Tenha isso em mente ao decidir a quantidade do seu pedido.
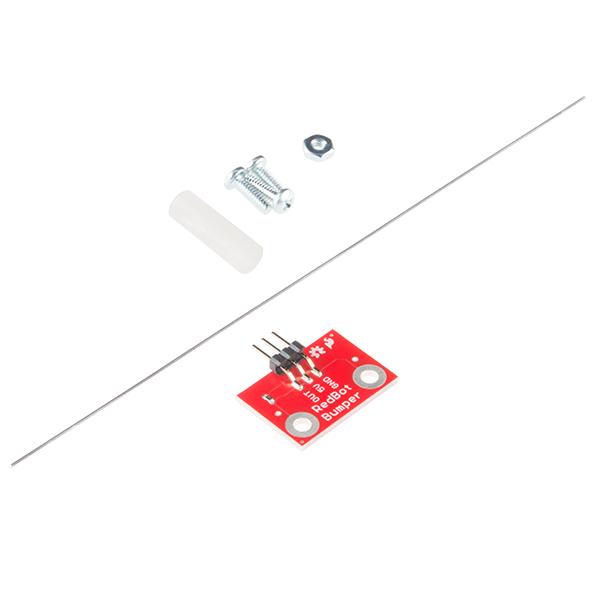
O pacote inclui:
- Uma placa abundante mecânica
- Um bigode
- Um impasse de nylon 4-40 de 19,05 mm
- Uma porca sextavada 4-40
- Três parafusos de máquina Phillips 4-40 de 9,53 mm
O sensor de pára-choque mecânico apresenta um tamanho compacto de 26,27 x 17,67 mm, tornando-o perfeito para o seu RedBot.
Para obter informações mais detalhadas, você pode acessar o esquema, os arquivos Eagle, o RedBot Experiment Guide, o RedBot Shadow Chassis Assembly Guide e o GitHub no site Sparkfun . Você também pode assistir ao vídeo do produto para ver o sensor mecânico do pára-choque em ação.
O Sensor Sparkfun RedBot - Amortecedor Mecânico é uma pequena adição que pode fazer uma grande diferença no desempenho do seu robô. É uma ferramenta essencial para qualquer construtor de robôs que queira melhorar a navegação do seu RedBot e evitar potenciais colisões.
Propriedades
| Marca | Sparkfun |
| Modelo | SEN-11999 |
| Mais informações | GitHub - sparkfun/RedBot_Whisker_Bumper: Super-simple board to provide the RedBot with a mechanical whisker to detect collisions. |
| Comprimento | 100 mm |
| Largura | 130 mm |
| Altura | 7 mm |
| Peso | 14,2 g |
 Sensor Sparkfun RedBot - Amortecedor Mecânico € 2,55
Sensor Sparkfun RedBot - Amortecedor Mecânico € 2,55 Perguntas do cliente
Avaliações de Clientes
- Reduzido Em estoque -40 % Sparkfun Chave seletora e tampa - iluminada (vermelha) € 6,65 € 4,- Ver produto
- Reduzido Em estoque -38 % Sparkfun Conector Qwiic JST - SMD de 4 pinos (vertical) € 1,30 € 0,80 Ver produto
- Reduzido Em estoque -38 % Sparkfun Suporte de bateria - 1xAAA (PTH) € 0,80 € 0,50 Ver produto
- Reduzido Em estoque -40 % Sparkfun Kit de cabeçalho empilhável Arduino - R3 € 3,85 € 2,30 Ver produto
- Reduzido Em estoque -40 % Sparkfun Cabo flexível Qwiic - 200 mm € 3,15 € 1,90 Ver produto
- Reduzido Em estoque -39 % Sparkfun Chave oscilante - SPST (ângulo reto) € 1,80 € 1,10 Ver produto
- Reduzido Em estoque -40 % Sparkfun Arduino Pro Mini 328 - 5V/16MHz € 15,80 € 9,45 Ver produto
- Reduzido Em estoque -39 % Quebra do sensor de linha Sparkfun - QRE1113 (Digital) € 6,35 € 3,85 Ver produto
- Reduzido 2 pieces Em estoque -40 % Sparkfun Conjunto de cabeçalho empilhável ESP32 Thing € 3,60 € 2,15 Ver produto
- Reduzido Em estoque -40 % Sparkfun Fio de Conexão - Marrom (22 AWG) € 5,35 € 3,20 Ver produto
- Reduzido Em estoque -40 % Sparkfun Pontas de prova de jacaré - multicoloridas (pacote com 10) € 7,40 € 4,45 Ver produto
- Reduzido Em estoque -40 % Sparkfun Micro 6DoF IMU Breakout - BMI270 (Qwiic) € 24,40 € 14,65 Ver produto
- Reduzido Em estoque -40 % Sparkfun Ferramenta de dobra de chumbo do resistor € 12,45 € 7,50 Ver produto
- Reduzido Em estoque -40 % Sparkfun Fita de Cobre - Adesivo Condutivo, 5mm - 15 metros € 8,65 € 5,20 Ver produto
- Reduzido Em estoque -39 % Sparkfun Hobby Motor - Engrenagem € 3,05 € 1,85 Ver produto