









Driver de motor de alta potência Pololu Dual G2 18v18 para Raspberry Pi (montado)
Descrição Esquerda Anexos
Esta placa adicional facilita o controle de dois motores CC de alta potência com um Raspberry Pi. Suas pontes MOSFET H discretas duplas suportam uma ampla faixa operacional de 6,5 V a 30 V e são eficientes o suficiente para fornecer 18 A contínuos sem um dissipador de calor. Os drivers oferecem funcionalidade básica de limitação de corrente e aceitam frequências PWM ultrassônicas para uma operação mais silenciosa. Os mapeamentos de pinos padrão facilitam o início, mas podem ser personalizados para aplicativos mais especializados. Esta versão é enviada totalmente montada com conectores soldados.
A tensão operacional mínima para todas as quatro versões é de 6,5 V, enquanto as tensões operacionais máximas são fornecidas na tabela acima. A placa também inclui um regulador de redução de comutação de 5 V, 2,5 A integrado que pode ser usado para alimentar o Raspberry Pi ao qual está conectado, permitindo a operação a partir de uma única fonte de alimentação.
A configuração padrão do driver usa seis pinos GPIO para controlar os drivers do motor, fazendo uso das saídas PWM de hardware do Raspberry Pi e usa dois pinos adicionais para ler as saídas de status dos drivers. No entanto, os mapeamentos de pinos podem ser personalizados se os padrões não forem convenientes, e os pinos para detecção e limitação de corrente estão acessíveis na placa para aplicações mais avançadas.
A placa corresponde à especificação mecânica Raspberry Pi HAT (Hardware Attached on Top), embora não esteja em conformidade com as especificações completas do HAT devido à falta de um ID EEPROM. (Uma pegada para adicionar seu próprio EEPROM está disponível para aplicações onde seria útil; pull-ups em SDA, SCL e WP são fornecidos.) Não é prático usar esta placa de expansão com o Raspberry Pi Modelo A ou Modelo original B devido a diferenças em sua pinagem e fator de forma.
Esses drivers de motor duplo também estão disponíveis como shields Arduino. Para versões de canal único em um fator de forma mais compacto, considere nossos drivers de motor de alta potência. Para alternativas menores, de menor consumo e de menor custo projetadas para um Raspberry Pi, considere nosso driver de motor duplo MC33926 para Raspberry Pi, driver de motor duplo MAX14870 para Raspberry Pi e driver de motor duplo DRV8835 para Raspberry Pi.
Características comuns a todas as versões
- Operação PWM até 100 kHz
- Os LEDs indicadores do motor mostram o que as saídas estão fazendo mesmo quando nenhum motor está conectado
- O regulador de tensão abaixador integrado de 5 V, 2,5 A alimenta a base do Raspberry Pi para operação com alimentação única
- biblioteca Python torna mais fácil começar a usar esta placa como uma placa de expansão do driver do motor
- Os mapeamentos de pinos GPIO podem ser personalizados se os mapeamentos padrão não forem convenientes
- Os pinos de detecção e limitação de corrente são expostos para uso avançado
- Proteção contra tensão reversa
- Desligamento por subtensão
- Proteção contra curto-circuito
Detalhes para este item #3751
- Tensão operacional: 6,5 V a 30 V (máximo absoluto; não destinado ao uso com baterias de 24 V)
- Corrente de saída: 18 A contínua
- Limitação de corrente ativa (corte) com limite padrão aproximado de 50 A (pode ser ajustado para baixo)
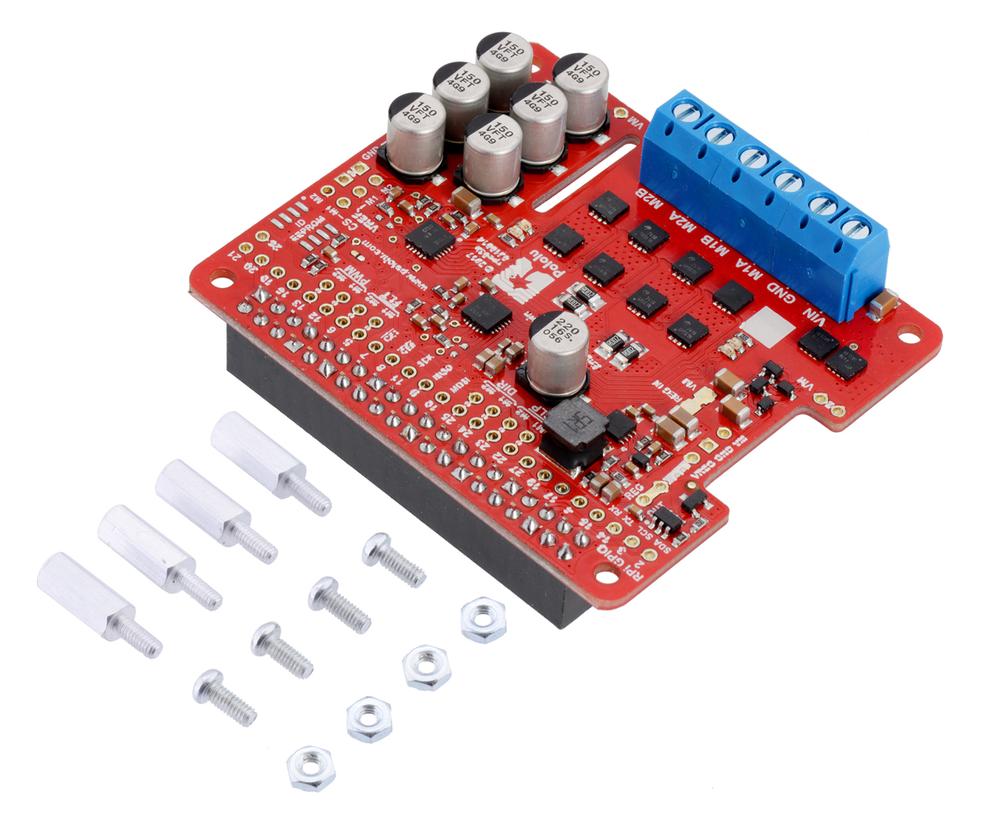
Esta versão do 18v18 motorista é Totalmente montado, com um cabeçalho fêmea de 0,1″ de 2 × 20 pinos (para a interface Raspberry Pi) e uma tira de seis pinos de blocos terminais de 5 mm (para alimentação da placa e saídas do motor) soldadas. Está vermelho PCB e o número 150 em cima dos seis capacitores eletrolíticos de prata altos no canto da placa. (Consulte o item nº 3750 para uma versão de kit com conectores incluídos, mas não soldados.)
Quatro espaçadores M2.5 (comprimento de 11 mm), parafusos e porcas estão incluídos para prender a placa ao Raspberry Pi na altura adequada para o conector GPIO.
Blocos de curto-circuito e conectores macho de 0,1" (não incluídos) podem ser usados para fazer algumas das modificações opcionais mais avançadas na placa, como remapear os pinos de controle.
O driver do motor inclui seis capacitores de energia eletrolítica de 100 μF ou 150 μF, e há espaço para adicionar capacitores adicionais (por exemplo, para compensar fios de energia longos ou aumentar a estabilidade da fonte de alimentação). Capacitores de energia adicionais geralmente não são necessários e nenhum capacitor adicional está incluído com este driver de motor.
Um Raspberry Pi é não incluso.
Poder
Uma fonte de alimentação apropriada do motor deve ser conectada aos grandes pads VIN e GND do driver do motor. A placa inclui um circuito de proteção contra tensão reversa que ajuda a evitar danos caso a fonte de alimentação do motor seja conectada ao contrário. A tensão de entrada com proteção reversa pode ser acessada para uso em outros circuitos através dos dois pinos marcados como VM no lado esquerdo da placa. Por padrão, a fonte de alimentação do motor também alimenta um regulador de redução de comutação de 5 V, 2,5 A que fornece energia ao Raspberry Pi conectado.
Um circuito de diodo ideal nesta placa evita que a corrente reversa flua para a fonte de 5 V da placa do driver do motor se o Raspberry Pi for alimentado separadamente (por exemplo, através de seu receptáculo de alimentação USB). No entanto, começando com o Raspberry Pi 3 Modelo B+, não há nenhum circuito de diodo ideal correspondente na entrada de alimentação USB do Raspberry Pi, portanto, é possível que a placa do driver retroalimenta um adaptador de alimentação USB através do Raspberry Pi. Como resultado, não recomendamos conectar alimentação USB externa ao Raspberry Pi enquanto ele estiver sendo alimentado pelo driver do motor.
A retroalimentação não é um problema com as versões mais antigas do Raspberry Pi, que possuem um circuito de diodo na entrada de alimentação USB. Com as versões do Raspberry Pi anteriores ao Pi 3 B+, é seguro ter uma fonte de alimentação diferente conectada ao Raspberry Pi por meio de seu receptáculo USB enquanto o driver do motor está conectado e alimentado.
Se você deseja alimentar o Raspberry Pi separadamente, o regulador pode ser desconectado cortando dois traços expostos na placa: um entre os pads de montagem em superfície rotulados como “VM” e “REG IN” e outro entre os dois pinos pelo “ REG OUT”, conforme mostrado à direita. Nas versões 24v14 e 24v18, desligar o regulador aumenta a tensão operacional máxima absoluta da placa para 40 V.
Opções de controle do motor
Com o pino PWM mantido baixo, ambas as saídas do motor serão mantidas baixas (uma operação de freio). Com PWM alto, as saídas do motor serão acionadas de acordo com a entrada DIR. Isso permite dois modos de operação: sinal-magnitude, no qual o ciclo de trabalho PWM controla a velocidade do motor e DIR controla a direção, e bloqueio antifase, no qual um sinal modulado por largura de pulso é aplicado ao pino DIR com PWM mantido alto.
Na operação antifase travada, um ciclo de trabalho baixo aciona o motor em uma direção e um ciclo de trabalho alto aciona o motor na outra direção; um ciclo de trabalho de 50% desliga o motor. Uma implementação antifase bloqueada bem-sucedida depende da indutância do motor e da frequência de comutação suavizando a corrente (por exemplo, tornando a corrente zero no caso de ciclo de trabalho de 50%), portanto, uma alta frequência de PWM pode ser necessária.
frequência PWM
O driver do motor suporta frequências PWM de até 100 kHz, mas observe que as perdas de comutação no driver serão proporcionais à frequência PWM. Normalmente, cerca de 20 kHz é uma boa escolha para operação de magnitude de sinal, pois é alto o suficiente para ser ultrassônico, o que resulta em uma operação mais silenciosa.
Um pulso no pino PWM deve ser alto por uma duração mínima de aproximadamente 0,5 µs antes que as saídas sejam ativadas pela duração correspondente (qualquer pulso de entrada mais curto não produz uma alteração nas saídas), portanto, ciclos de serviço baixos ficam indisponíveis em altas frequências . Por exemplo, a 100 kHz, o período de pulso é de 10 µs e o ciclo de trabalho não zero mínimo alcançável é 0,5/10 ou 5%.
Condições de falha
O acionador do motor pode detectar vários estados de falha que ele relata colocando o pino FLT em nível baixo; esta é uma saída de dreno aberto que deve ser puxada até a tensão lógica do seu sistema. As falhas detectáveis incluem curtos-circuitos nas saídas, subtensão e sobretemperatura. Todas as falhas desabilitam as saídas do motor, mas não são travadas, ou seja, o driver tentará retomar a operação quando a condição de falha for removida (ou após um atraso de alguns milissegundos no caso da falha de curto-circuito). A falha de superaquecimento fornece uma indicação fraca de que a placa está muito quente, mas não indica diretamente a temperatura dos MOSFETs, que geralmente são os primeiros componentes a superaquecer, portanto, você não deve contar com essa falha para evitar danos por superaquecimento. - condições de temperatura.
Pins de remapeamento
Todos os pinos GPIO do Raspberry Pi são divididos ao longo de uma fileira de orifícios numerados logo abaixo do conector GPIO de 40 pinos. Cada pino GPIO usado pela placa é conectado desta linha ao pino do driver do motor correspondente por um traço no lado superior da placa abrangendo o par de orifícios. Se você deseja remapear um desses pinos do driver do motor, pode cortar seu traço com uma faca e, em seguida, passar um fio do orifício inferior para um novo pino GPIO.
Observe que os mapeamentos de pinos padrão foram escolhidos para que os pull-ups e pull-downs GPIO padrão do Raspberry Pi correspondam à direção em que os pinos do driver do motor são ou devem ser puxados (para cima para SF, para baixo para outros); se você remapear os pinos do driver do motor sem prestar atenção a isso, poderá encontrar problemas com os pinos sendo puxados para o lado errado. Veja o Documentação do Raspberry Pi para saber mais sobre os estados GPIO padrão.
Detecção e limitação de corrente
O driver do motor expõe pinos de detecção e limitação de corrente que não estão conectados ao Raspberry Pi, mas são acessíveis por meio de seus próprios orifícios caso você queira usá-los em um aplicativo mais avançado.
O driver tem a capacidade de limitar a corrente do motor através do corte de corrente: uma vez que a corrente de acionamento do motor atinge um limite definido, o driver entra no modo de freio (decaimento lento) por cerca de 25 μs antes de aplicar energia para acionar o motor novamente. Isso torna mais prático usar o driver com um motor que pode consumir apenas alguns amperes durante a operação, mas pode consumir muitas vezes essa quantidade (dezenas de amperes) ao iniciar.
Nesta placa (18v18), o limite de limitação de corrente nominal é definido para cerca de 50 A por padrão. Para cada canal do motor, você pode reduzir o limite conectando um resistor adicional entre o pino VREF e o pino GND adjacente; o gráfico abaixo mostra como o limite de corrente se relaciona com o valor do resistor VREF. Por exemplo, adicionar um resistor de 100 kΩ entre VREF e GND reduz o limite de corrente para aproximadamente 29 A. Observe que o limite de limitação de corrente não é altamente preciso e é menos preciso em configurações especialmente baixas (indicadas pela parte tracejada da curva) .
Os pinos de detecção de corrente do driver, rotulados como CS, produzem tensões proporcionais às correntes do motor enquanto as pontes H estão acionando. A tensão de saída para esta versão é de cerca de 20 mV/A mais um pequeno deslocamento, que normalmente é de cerca de 50 mV.
Cada saída CS está ativa apenas enquanto a ponte H correspondente estiver no modo drive; fica inativo (baixo) quando o canal está em modo de freio (decaimento lento), que acontece quando a entrada PWM está baixa ou quando a limitação de corrente está ativa. A corrente continuará circulando pelo motor quando o driver começar a frear, mas a tensão no pino CS não refletirá com precisão a corrente do motor no modo de frenagem. A tensão CS é usada internamente pelo driver do motor, portanto, para evitar interferir na operação do driver, você não deve adicionar um capacitor a este pino ou conectar uma carga que consome mais do que alguns mA dele.
Considerações de dissipação de energia no mundo real
Os MOSFETs podem lidar com grandes picos de corrente por curtos períodos (por exemplo, 100 A por alguns milissegundos), e o corte de corrente do driver manterá a corrente média abaixo do limite definido. As classificações de pico são para transientes rápidos (por exemplo, quando um motor é ligado pela primeira vez), e a classificação contínua depende de várias condições, como a temperatura ambiente. O PWM do motor introduzirá aquecimento adicional proporcional à frequência. A corrente real que você pode fornecer dependerá de quão bem você pode manter o driver do motor resfriado. A placa de circuito impresso do driver foi projetada para retirar o calor dos MOSFETs, mas o desempenho pode ser melhorado adicionando um dissipador de calor ou fluxo de ar. Para instalações de alta corrente, os fios do motor e da fonte de alimentação também devem ser soldados diretamente em vez de passar pelos blocos terminais fornecidos, que são classificados para até 16 A.
Aviso: Este acionador de motor não possui desligamento por excesso de temperatura. Uma condição de sobretemperatura ou sobrecorrente pode causar dano permanente ao condutor do motor. Você pode considerar usar a saída de detecção de corrente integrada do driver (com um ADC externo) ou um sensor de corrente externo para monitorar seu consumo de corrente.
Propriedades
| Marca | Pololu |
| Modelo | 3751 |
Entregue em 5 a 7 dias
 Driver de motor de alta potência Pololu Dual G2 18v18 para Raspberry Pi (montado) Entregue em 5 a 7 dias € 100,65
Driver de motor de alta potência Pololu Dual G2 18v18 para Raspberry Pi (montado) Entregue em 5 a 7 dias € 100,65 produtos alternativos
- Pololu Controlador de motor USB Jrk G2 24v21 com feedback € 201,35 Ver produto
- Driver de motor de alta potência Pololu Dual G2 24v14 para Raspberry Pi (montado) € 107,15 Ver produto
- Pololu Driver de motor de alta potência G2 24v13 € 60,35 Ver produto
- Pololu Controlador de motor USB Jrk G2 18v19 com feedback € 147,65 Ver produto
- Pololu Controlador de motor simples de alta potência G2 24v12 € 180,95 Ver produto
- Driver de motor de alta potência Pololu Dual G2 18v22 Shield para Arduino € 140,95 Ver produto
- Driver de motor de alta potência Pololu Dual G2 18v18 Shield para Arduino € 100,65 Ver produto
- Driver de motor de alta potência Pololu G2 24v21 € 76,50 Ver produto
- Driver de motor de alta potência Pololu Dual G2 24v14 Shield para Arduino € 107,35 Ver produto
- Pololu Controlador de Motor Simples de Alta Potência G2 18v15 (Conectores Soldados) € 189,60 Ver produto
- Pololu Controlador de motor USB Jrk G2 18v27 com feedback € 201,35 Ver produto
- Driver de motor de alta potência Pololu Dual G2 18v22 para Raspberry Pi (kit parcial) € 127,50 Ver produto
- Driver de motor de alta potência Pololu G2 18v17 € 60,35 Ver produto
- Pololu Controlador de motor USB Jrk G2 24v13 com feedback € 147,65 Ver produto
- Pololu Controlador de motor simples de alta potência G2 24v19 € 221,25 Ver produto
- Driver de motor de alta potência Pololu Dual G2 24v14 para Raspberry Pi (kit parcial) € 100,65 Ver produto
- Driver de motor de alta potência Pololu Dual G2 18v18 para Raspberry Pi (kit parcial) € 93,75 Ver produto
- Driver de motor de alta potência Pololu Dual G2 24v18 Shield para Arduino € 140,95 Ver produto
- Pololu Controlador de Motor Simples de Alta Potência G2 24v12 (Conectores Soldados) € 189,20 Ver produto
- Pololu Controlador de motor simples de alta potência G2 18v15 € 181,30 Ver produto
- Driver de motor de alta potência Pololu Dual G2 24v18 para Raspberry Pi (kit parcial) € 127,50 Ver produto
- Driver de motor de alta potência Pololu G2 18v25 € 76,35 Ver produto
- Pololu Controlador de motor USB Jrk G2 21v3 com feedback (conectores soldados) € 76,35 Ver produto
- Pololu Controlador de motor simples de alta potência G2 18v25 € 221,70 Ver produto
Perguntas do cliente
Avaliações de Clientes
- Reduzido Em estoque -50 % Pololu Mini interruptor deslizante: 3 pinos, SPDT, 0,3 A (pacote com 3) € 3,20 € 1,60 Ver produto
- Reduzido Em estoque -50 % Pololu Regulador de tensão elevador/redutor 5V, 2A S13V20F5 € 24,05 € 12,05 Ver produto
- Reduzido Em estoque -50 % Pololu DRV8838 Suporte de driver de motor CC escovado simples € 6,65 € 3,35 Ver produto
- Reduzido Em estoque -49 % Pololu Bloco terminal de parafuso: 2 pinos, passo de 0,1 ″, entrada lateral (pacote com 4) € 4,75 € 2,40 Ver produto
- Reduzido Em estoque -50 % Pololu Interruptor de ação instantânea com alavanca de rolo de 16,3 mm: 3 pinos, SPDT, 5A € 3,40 € 1,70 Ver produto
- Reduzido Em estoque -50 % Rodízio de bolas Pololu com bola de plástico de 3/4" € 7,35 € 3,70 Ver produto
- Reduzido Em estoque -50 % Pololu Chave deslizante Mini MOSFET com proteção contra tensão reversa, LV € 6,05 € 3,05 Ver produto
- Reduzido Em estoque -50 % Pololu 3.3V, 2.6A regulador de tensão abaixador D24V22F3 € 25,40 € 12,70 Ver produto
- Reduzido Em estoque -50 % Pololu 3.3V regulador de tensão U1V11F3 € 10,65 € 5,35 Ver produto
- Reduzido Em estoque -50 % Pololu Fio trançado: branco, 22 AWG, 50 pés € 14,70 € 7,35 Ver produto
- Reduzido Em estoque -50 % Pololu Deslocador de nível lógico, 4 canais, bidirecional € 4,70 € 2,35 Ver produto
- Reduzido Em estoque -50 % Pololu Mini interruptor de alimentação com proteção contra tensão reversa, LV € 6,65 € 3,35 Ver produto
- Reduzido Em estoque -50 % Pololu 3.3V, 500mA regulador de tensão abaixador D24V5F3 € 12,- € 6,- Ver produto
- Reduzido Em estoque -50 % Pololu 5V, 500mA Regulador de tensão abaixador D24V5F5 € 12,- € 6,- Ver produto
- Reduzido Em estoque -49 % Par de suporte de motoredutor Pololu Micro Metal - Preto € 3,95 € 2,- Ver produto