









Adafruit Motor CC N20 com codificador magnético - 6V com relação de engrenagem 1:150
Descrição
O primeiro passo em um projeto de robótica envolve fazer um motor girar, revelando variações na velocidade devido à voltagem, ao ambiente e às diferenças de fabricação. Para medir com precisão a velocidade do motor, pode-se acoplar uma roda codificadora, juntamente com um contador óptico ou magnético. Essa combinação permite que o microcontrolador conte os raios da roda e determine a velocidade de forma eficiente.
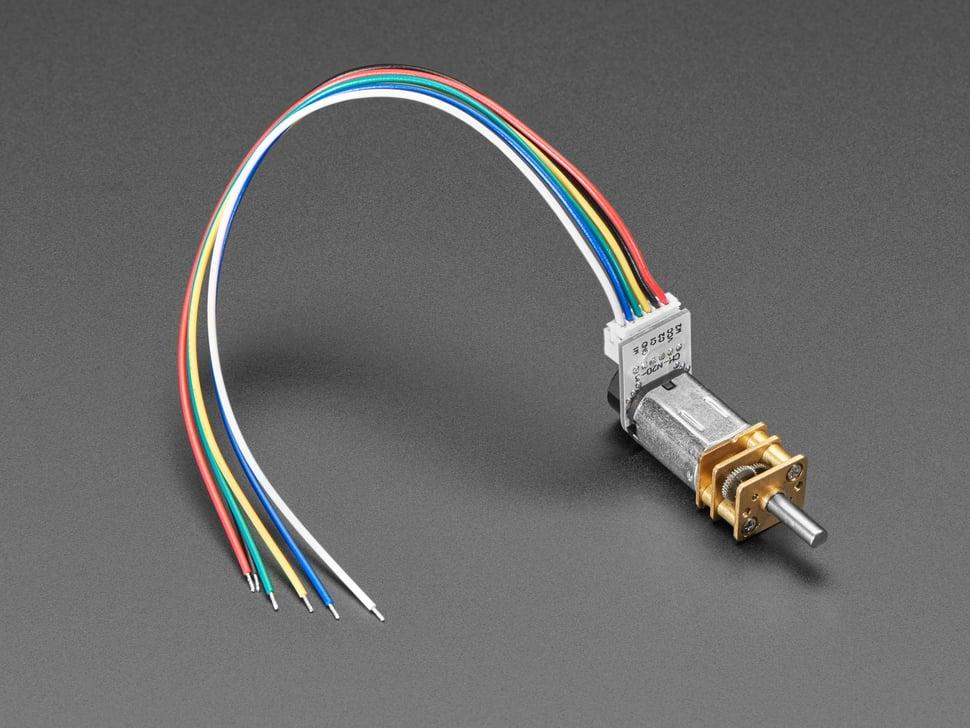
Aprimore sua configuração adicionando um segundo contador para detectar a direção juntamente com a velocidade, simplificando o processo com nosso motor especialmente projetado. Este motor, além de compacto no tamanho padrão N20, vem equipado com uma roda magnética e dois sensores de efeito Hall pré-instalados, garantindo uma integração perfeita.
O motor funciona de forma otimizada com uma alimentação de 4,5 a 6 V CC através dos fios branco e vermelho, que se conectam ao driver do motor e permitem o ajuste de velocidade via PWM com uma ponte H. Conecte o fio azul ao terra do microcontrolador, forneça de 3 a 5 V CC ao fio preto e leia os sinais do sensor de efeito Hall nos fios amarelo e verde para obter um feedback preciso.
Um exemplo de código está disponível para Arduino , adaptável a outras linguagens de programação, utilizando interrupções nos pinos do encoder para calcular a velocidade. Este motor possui uma relação de engrenagem de 1:150, requer alimentação nominal de 6V e consome cerca de 100mA, atingindo um pico de 200mA quando parado. A relação de engrenagem ajusta o torque e a rotação sem afetar o consumo de corrente, proporcionando versatilidade em diversas aplicações.
Propriedades
| Marca | Adafruit |
| Modelo | 4640 |
ETA não é conhecido
 Adafruit Motor CC N20 com codificador magnético - 6V com relação de engrenagem 1:150 € 15,80
Adafruit Motor CC N20 com codificador magnético - 6V com relação de engrenagem 1:150 € 15,80 Perguntas do cliente
Avaliações de Clientes
- Em estoque Adafruit Módulo de luz de fundo de LED branco - médio 23 mm x 75 mm € 3,30 Ver produto
- Em estoque Adafruit Conjunto de cabo de alimentação CC à prova d'água - 5,5/2,1 mm € 3,30 Ver produto
- Em estoque Adafruit Interruptor deslizante SPDT compatível com placa de ensaio € 1,30 Ver produto
- Em estoque Adafruit Piezo Fechado Pequeno com Fios € 1,30 Ver produto
- Em estoque Adafruit Mini alto-falante de metal com fios - 8 ohm 0,5 W € 2,55 Ver produto
- Em estoque Adafruit Cabo JST PH de 2 pinos – Conector macho de 200 mm € 1,05 Ver produto
- Em estoque Adafruit Conjunto de 6 fios jumper com conectores tipo jacaré pequenos e macho € 6,55 Ver produto
- Em estoque Adafruit NOOds - Filamento de LED Flexível - 3V 300mm de comprimento - Verde Limão € 8,90 Ver produto
- Em estoque Adafruit NOOds - Filamento de LED Flexível - 3V 300mm de comprimento - Branco Quente € 5,85 Ver produto
- Em estoque Adafruit Tecido condutor tecido - quadrado de 20 cm € 6,35 Ver produto
- Em estoque Adafruit Noodles de um só lado - Filamento LED Flexível de 128 mm - Azul 3V € 5,10 Ver produto
- Em estoque Adafruit Micro Lipo - carregador USB LiIon/LiPoly € 7,65 Ver produto
- 5 pieces Em estoque Adafruit LED NeoPixel Difuso de 5 mm com furo passante - Pacote com 5 € 6,35 Ver produto
- Em estoque Adafruit Conjunto de alto-falantes estéreo fechados - 3W 4 Ohm € 9,40 Ver produto
- Em estoque Carregador USB /DC/Solar Adafruit bq25185 com placa buck de 3,3 V € 11,45 Ver produto
Itens recentemente vistos
- Adafruit Motor CC N20 com codificador magnético - 6V com relação de engrenagem 1:150 € 15,80 Ver produto
- Adafruit Anel deslizante toroidal - 2,1" OD 1/2" ID, 6 fios, máx. 240 V a 5 A € 125,30 Ver produto
- Adafruit Chave de fenda estrela/pentalobe de 5 pontas de alumínio para iPhone 4S de 0,8 mm € 12,75 Ver produto
- Adesivo Adafruit AVR para placa de ensaio Arduino - compatíveis - 10 unidades € 3,85 Ver produto
- Adafruit PCB Breakout SMT para SOIC-12 ou TSSOP-12 - Pacote com 6! € 6,35 Ver produto
- Adafruit Amostrador de clipe de tira de LED RGB analógico e DotStar sem solda € 3,85 Ver produto
- Adafruit Conector de soquete reto fêmea de 0,1" 2x36 pinos (pacote com 5) € 7,65 Ver produto
- Adafruit Placas Perfboard Universais de Baquelite - Pacote com 10 € 6,35 Ver produto
- Adafruit Matriz LED branca ultrabrilhante pequena de 1,2" 8x8 + mochila € 17,05 Ver produto
- Transmissor FM estéreo Adafruit com breakout RDS/RBDS - Si4713 € 24,95 Ver produto
- Adafruit Adaptador de áudio e vídeo VGA para HDMI € 18,85 Ver produto
- Adafruit Hub USB 2.0 e Ethernet - 3 portas USB e 1 porta Ethernet € 21,90 Ver produto
- Adafruit Neo Trinkey - Chave USB SAMD21 com 4 NeoPixels € 8,90 Ver produto
- Adafruit Sensor de fluxo de água tipo turbina transparente com conector JST de 3 pinos € 8,15 Ver produto
- Adafruit 3.52" 340x180 eInk / ePaper Quadricolor - Tela sem Moldura € 24,95 Ver produto