









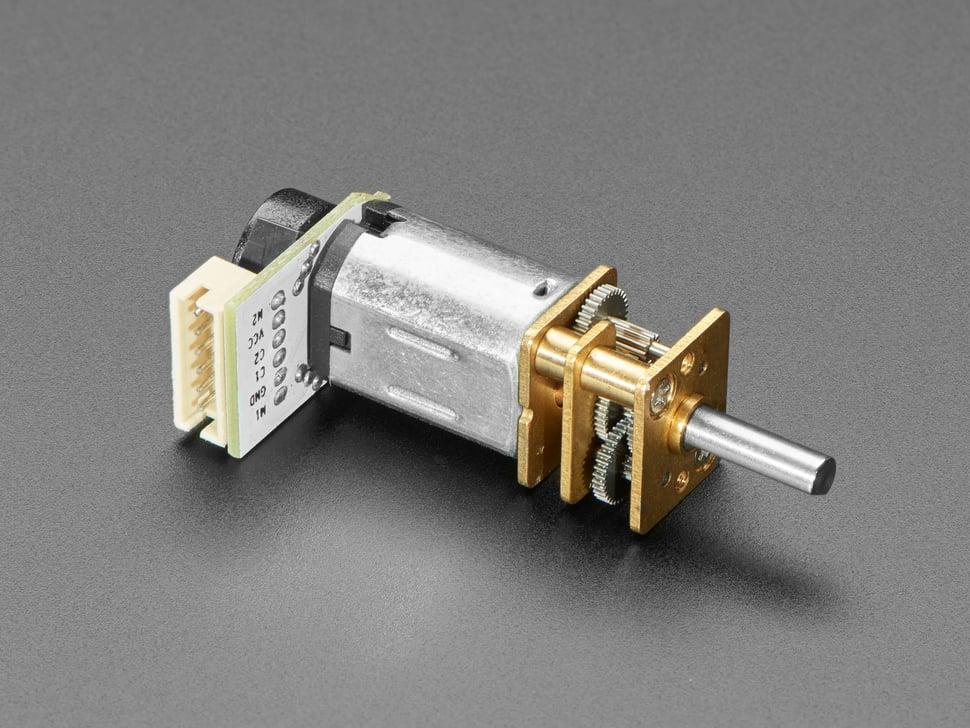
Adafruit Motor CC N20 com codificador magnético - 6V com relação de engrenagem 1:100
Descrição
O primeiro passo em projetos de robótica é fazer o motor girar. No entanto, nem todos os motores operam na mesma velocidade, mesmo com números de peça idênticos, devido a variações de voltagem, ambiente e fabricação. O próximo passo crucial é determinar a velocidade do motor, uma tarefa complexa que pode ser simplificada com a adição de uma roda codificadora e um contador óptico ou magnético. Conforme o motor gira, a roda codificadora gira, permitindo que o contador detecte cada raio, possibilitando o cálculo da velocidade. A funcionalidade pode ser aprimorada com a adição de um segundo contador para determinar a direção.
Este motor simplifica o processo com uma roda magnética integrada e dois sensores de efeito Hall. Sendo um motor compacto do tamanho N20, ele opera suavemente com alimentação de 4,5 a 6 V CC. Conecte os fios branco e vermelho ao seu driver de motor para ajuste de velocidade e controle de direção usando PWM e uma ponte H. O fio azul se conecta ao pino de terra do seu microcontrolador, enquanto o fio preto se adapta a qualquer fonte de 3 a 5 V CC. As saídas do sensor de efeito Hall são acessíveis através dos fios amarelo e verde.
Um exemplo de código Arduino é fornecido, mas pode ser adaptado para outras linguagens. Ele envolve interromper um dos pinos do encoder, contar o tempo desde a última interrupção e multiplicar esse tempo por 14 contagens por revolução e pela relação de engrenagem. Este motor possui uma relação de engrenagem de 1:100, utiliza uma alimentação nominal de 6V e consome cerca de 100mA (200mA quando travado). A relação de engrenagem impacta o torque e a rotação, mas não o consumo de corrente.
Propriedades
| Marca | Adafruit |
| Modelo | 4639 |
Entregue em 10 a 12 dias
 Adafruit Motor CC N20 com codificador magnético - 6V com relação de engrenagem 1:100 Entregue em 10 a 12 dias € 19,85
Adafruit Motor CC N20 com codificador magnético - 6V com relação de engrenagem 1:100 Entregue em 10 a 12 dias € 19,85 Perguntas do cliente
Avaliações de Clientes
- Reduzido Em estoque -50 % Adafruit NOOds - Filamento de LED Flexível - 3V 300mm de comprimento - Vermelho € 10,70 € 5,35 Ver produto
- Reduzido Em estoque -50 % Adafruit Conectores de empilhamento para Feather - Conectores fêmea de 12 e 16 pinos € 1,80 € 0,90 Ver produto
- Reduzido Em estoque -50 % Adafruit SCD-41 - Sensor Verdadeiro de Temperatura e Umidade de CO2 € 71,25 € 35,60 Ver produto
- Reduzido Em estoque -50 % Adafruit NOOds - Filamento de LED Flexível - 3V 300mm de comprimento - Amarelo € 10,70 € 5,35 Ver produto
- Reduzido Em estoque -50 % Adafruit Mini alto-falante de metal com fios - 8 ohm 0,5 W € 2,80 € 1,40 Ver produto
- Reduzido Em estoque -50 % Adafruit Conjunto de bobina de fio de conexão - 22AWG Stranded-Core - 6 x 25 pés € 28,45 € 14,25 Ver produto
- Reduzido Em estoque -50 % Adafruit Conjunto de cabos de 4 fios polarizados à prova d'água € 3,60 € 1,80 Ver produto
- Reduzido Em estoque -49 % Adafruit Conector Macho de Pino Sem Solda - Passo de 2,54mm / 0,1" € 2,75 € 1,40 Ver produto
- Reduzido 10 pieces Em estoque -50 % Adafruit Cabeçalho macho de tira de 36 pinos de 0,1 pol. - Preto - pacote com 10 € 7,10 € 3,55 Ver produto
- Reduzido Em estoque -51 % Adafruit Sensores de interrupção de feixe infravermelho com terminais de alta qualidade - LEDs de 3 mm € 4,25 € 2,10 Ver produto
- Reduzido Em estoque -51 % Adafruit Módulo de retroiluminação LED branco - Grande 45 mm x 86 mm € 4,25 € 2,10 Ver produto
- Reduzido Em estoque -50 % Adafruit Alto-falante - 3" de diâmetro - 4 Ohm 3 Watt € 2,80 € 1,40 Ver produto
- Reduzido Em estoque -50 % Adafruit Alto-falante - 40 mm de diâmetro - 4 Ohms - 5 Watts € 7,10 € 3,55 Ver produto
- Reduzido Em estoque -50 % Adafruit Amplificador de microfone de eletreto - MAX4466 com ganho ajustável € 9,95 € 4,95 Ver produto
- Reduzido Em estoque -50 % Adafruit Mini Sensor PIR Básico - BL412 € 2,80 € 1,40 Ver produto
Itens recentemente vistos
- Adafruit Motor CC N20 com codificador magnético - 6V com relação de engrenagem 1:100 € 19,85 Ver produto
- Sparkfun Sunny Buddy - Carregador Solar MPPT € 47,30 Ver produto
- Adafruit HDMI 4 Pi: Tela de 7" e Áudio 1024x600 com tela sensível ao toque € 136,75 Ver produto
- Adafruit Bloco de terminais para plugue de áudio de 3,5 mm (1/8") com 4 polos (TRRS) € 6,65 Ver produto
- Adafruit Tela IPS TFT colorida de 1,54" com resolução de 240x240 pixels € 17,80 Ver produto
- Sensor de pressão resistente à água Adafruit LPS33HW - STEMMA QT € 19,85 Ver produto
- Adafruit Mini alto-falante oval com fios curtos - 8 ohms, 1 watt € 5,85 Ver produto
- Display Adafruit FeatherWing de matriz de LEDs 8x16 de 0,8" - Vermelho € 19,10 Ver produto
- Adafruit Painel de matriz de LED RGB 64x64 com corte de 45 graus - espaçamento de 2,5 mm € 76,50 Ver produto
- Adafruit GD25Q16 - Memória Flash SPI de 2 MB em encapsulamento SOIC de 8 pinos € 4,85 Ver produto
- Adafruit Cabo de 2 pinos com passo de 1,25 mm e 20 cm de comprimento (proporção 1:1). € 4,10 Ver produto
- Adaptador Breakout Adafruit DS2484 de I2C para Barramento 1-Wire € 13,25 Ver produto
- Adafruit Sparkle Motion - Placa Tudo-em-Um WLED e xLights € 36,60 Ver produto
- Adafruit NeoPixel Pebble / Seed LED Strand - 150 LEDs - Espaçamento de 4" € 36,60 Ver produto
- Adafruit Cabo Reversor de Polaridade DC 5.5mm/2.1mm € 7,90 Ver produto